Pilote de stockage Device Mapper (déprécié)
Déprécié
Le pilote Device Mapper a été déprécié, et est supprimé dans Docker Engine v25.0. Si vous utilisez Device Mapper, vous devez migrer vers un pilote de stockage supporté avant de mettre à niveau vers Docker Engine v25.0. Lisez la page Pilotes de stockage Docker pour les pilotes de stockage supportés.
Device Mapper est un framework basé sur le noyau qui sous-tend de nombreuses technologies
avancées de gestion de volumes sur Linux. Le pilote de stockage devicemapper de Docker
exploite les capacités de provisioning fin et de snapshot de ce framework
pour la gestion d'images et de conteneurs. Cet article fait référence au pilote
de stockage Device Mapper comme devicemapper, et au framework du noyau comme Device Mapper.
Pour les systèmes où il est supporté, le support devicemapper est inclus dans
le noyau Linux. Cependant, une configuration spécifique est requise pour l'utiliser avec
Docker.
Le pilote devicemapper utilise des périphériques bloc dédiés à Docker et opère au
niveau bloc, plutôt qu'au niveau fichier. Ces périphériques peuvent être étendus en
ajoutant du stockage physique à votre hôte Docker, et ils performent mieux que l'utilisation
d'un système de fichiers au niveau du système d'exploitation (OS).
Prérequis
devicemapperest supporté sur Docker Engine - Community fonctionnant sur CentOS, Fedora, SLES 15, Ubuntu, Debian, ou RHEL.devicemappernécessite l'installation des paquetslvm2etdevice-mapper-persistent-data.- Changer le pilote de stockage rend inaccessibles tous les conteneurs que vous avez déjà
créés sur le système local. Utilisez
docker savepour sauvegarder les conteneurs, et poussez les images existantes vers Docker Hub ou un registre privé, afin de ne pas avoir besoin de les recréer plus tard.
Configurer Docker avec le pilote de stockage devicemapper
Avant de suivre ces procédures, vous devez d'abord satisfaire tous les prérequis.
Configurer le mode loop-lvm pour les tests
Cette configuration n'est appropriée que pour les tests. Le mode loop-lvm fait
usage d'un mécanisme 'loopback' qui permet aux fichiers sur le disque local d'être
lus et écrits comme s'ils étaient un disque physique réel ou un périphérique bloc.
Cependant, l'ajout du mécanisme loopback, et l'interaction avec la couche de
système de fichiers de l'OS, signifie que les opérations IO peuvent être lentes et gourmandes en ressources.
L'utilisation de périphériques loopback peut aussi introduire des conditions de course.
Cependant, configurer le mode loop-lvm peut aider à identifier des problèmes de base (tels que
des paquets espace utilisateur manquants, pilotes de noyau, etc.) avant de tenter la configuration plus
complexe requise pour activer le mode direct-lvm. Le mode loop-lvm ne devrait
donc être utilisé que pour effectuer des tests rudimentaires avant de configurer
direct-lvm.
Pour les systèmes de production, voir Configurer le mode direct-lvm pour la production.
-
Arrêtez Docker.
$ sudo systemctl stop docker -
Éditez
/etc/docker/daemon.json. S'il n'existe pas encore, créez-le. En supposant que le fichier était vide, ajoutez le contenu suivant.{ "storage-driver": "devicemapper" }Voir toutes les options de stockage pour chaque pilote de stockage dans la documentation de référence du démon
Docker ne démarre pas si le fichier
daemon.jsoncontient du JSON mal formé. -
Démarrez Docker.
$ sudo systemctl start docker -
Vérifiez que le démon utilise le pilote de stockage
devicemapper. Utilisez la commandedocker infoet cherchezStorage Driver.$ docker info Containers: 0 Running: 0 Paused: 0 Stopped: 0 Images: 0 Server Version: 17.03.1-ce Storage Driver: devicemapper Pool Name: docker-202:1-8413957-pool Pool Blocksize: 65.54 kB Base Device Size: 10.74 GB Backing Filesystem: xfs Data file: /dev/loop0 Metadata file: /dev/loop1 Data Space Used: 11.8 MB Data Space Total: 107.4 GB Data Space Available: 7.44 GB Metadata Space Used: 581.6 KB Metadata Space Total: 2.147 GB Metadata Space Available: 2.147 GB Thin Pool Minimum Free Space: 10.74 GB Udev Sync Supported: true Deferred Removal Enabled: false Deferred Deletion Enabled: false Deferred Deleted Device Count: 0 Data loop file: /var/lib/docker/devicemapper/data Metadata loop file: /var/lib/docker/devicemapper/metadata Library Version: 1.02.135-RHEL7 (2016-11-16) <...>
Cet hôte fonctionne en mode loop-lvm, qui n'est pas supporté sur
les systèmes de production. Ceci est indiqué par le fait que le Data loop file
et un Metadata loop file sont sur des fichiers sous
/var/lib/docker/devicemapper. Ce sont des fichiers clairsemés montés en loopback. Pour les systèmes de production, voir
Configurer le mode direct-lvm pour la production.
Configurer le mode direct-lvm pour la production
Les hôtes de production utilisant le pilote de stockage devicemapper doivent utiliser le mode direct-lvm.
Ce mode utilise des périphériques bloc pour créer le thin pool. C'est plus rapide que
d'utiliser des périphériques loopback, utilise les ressources système plus efficacement, et les périphériques
bloc peuvent grandir selon les besoins. Cependant, plus de configuration est requise qu'en mode loop-lvm.
Après avoir satisfait les prérequis, suivez les étapes
ci-dessous pour configurer Docker à utiliser le pilote de stockage devicemapper en
mode direct-lvm.
WarningChanger le pilote de stockage rend inaccessibles tous les conteneurs que vous avez déjà créés sur le système local. Utilisez
docker savepour sauvegarder les conteneurs, et poussez les images existantes vers Docker Hub ou un registre privé, afin de ne pas avoir besoin de les recréer plus tard.
Permettre à Docker de configurer le mode direct-lvm
Docker peut gérer le périphérique bloc pour vous, simplifiant la configuration du mode direct-lvm.
Ceci n'est approprié que pour de nouvelles installations Docker. Vous ne pouvez utiliser qu'un
seul périphérique bloc. Si vous devez utiliser plusieurs périphériques bloc,
configurez le mode direct-lvm manuellement à la place.
Les nouvelles options de configuration suivantes sont disponibles :
| Option | Description | Requis ? | Défaut | Exemple |
|---|---|---|---|---|
dm.directlvm_device |
Le chemin vers le périphérique bloc à configurer pour direct-lvm. |
Oui | dm.directlvm_device="/dev/xvdf" |
|
dm.thinp_percent |
Le pourcentage d'espace à utiliser pour le stockage depuis le périphérique bloc passé. | Non | 95 | dm.thinp_percent=95 |
dm.thinp_metapercent |
Le pourcentage d'espace à utiliser pour le stockage de métadonnées depuis le périphérique bloc passé. | Non | 1 | dm.thinp_metapercent=1 |
dm.thinp_autoextend_threshold |
Le seuil pour quand lvm devrait automatiquement étendre le thin pool en pourcentage de l'espace de stockage total. | Non | 80 | dm.thinp_autoextend_threshold=80 |
dm.thinp_autoextend_percent |
Le pourcentage d'augmentation du thin pool quand une auto-extension est déclenchée. | Non | 20 | dm.thinp_autoextend_percent=20 |
dm.directlvm_device_force |
Formater ou non le périphérique bloc même si un système de fichiers existe déjà dessus. Si défini à false et qu'un système de fichiers est présent, une erreur est journalisée et le système de fichiers est laissé intact. |
Non | false | dm.directlvm_device_force=true |
Éditez le fichier daemon.json et définissez les options appropriées, puis redémarrez Docker
pour que les changements prennent effet. La configuration daemon.json suivante définit toutes les
options du tableau ci-dessus.
{
"storage-driver": "devicemapper",
"storage-opts": [
"dm.directlvm_device=/dev/xdf",
"dm.thinp_percent=95",
"dm.thinp_metapercent=1",
"dm.thinp_autoextend_threshold=80",
"dm.thinp_autoextend_percent=20",
"dm.directlvm_device_force=false"
]
}Voir toutes les options de stockage pour chaque pilote de stockage dans la documentation de référence du démon
Redémarrez Docker pour que les changements prennent effet. Docker invoque les commandes pour configurer le périphérique bloc pour vous.
WarningChanger ces valeurs après que Docker ait préparé le périphérique bloc pour vous n'est pas supporté et cause une erreur.
Vous devez encore effectuer des tâches de maintenance périodiques.
Configurer le mode direct-lvm manuellement
La procédure ci-dessous crée un volume logique configuré comme un thin pool à
utiliser comme support pour le pool de stockage. Elle suppose que vous avez un périphérique bloc
de rechange à /dev/xvdf avec assez d'espace libre pour compléter la tâche. L'identifiant du périphérique
et les tailles de volumes peuvent être différents dans votre environnement et vous
devriez substituer vos propres valeurs tout au long de la procédure. La procédure assume
aussi que le démon Docker est dans l'état arrêté.
-
Identifiez le périphérique bloc que vous voulez utiliser. Le périphérique est situé sous
/dev/(tel que/dev/xvdf) et a besoin d'assez d'espace libre pour stocker les images et couches de conteneurs pour les charges de travail que l'hôte exécute. Un disque à état solide est idéal. -
Arrêtez Docker.
$ sudo systemctl stop docker -
Installez les paquets suivants :
-
RHEL / CentOS :
device-mapper-persistent-data,lvm2, et toutes les dépendances -
Ubuntu / Debian / SLES 15 :
thin-provisioning-tools,lvm2, et toutes les dépendances
-
-
Créez un volume physique sur votre périphérique bloc depuis l'étape 1, en utilisant la commande
pvcreate. Substituez votre nom de périphérique pour/dev/xvdf.WarningLes prochaines étapes sont destructives, alors assurez-vous que vous avez spécifié le bon périphérique.
$ sudo pvcreate /dev/xvdf Physical volume "/dev/xvdf" successfully created. -
Créez un groupe de volumes
dockersur le même périphérique, en utilisant la commandevgcreate.$ sudo vgcreate docker /dev/xvdf Volume group "docker" successfully created -
Créez deux volumes logiques nommés
thinpooletthinpoolmetaen utilisant la commandelvcreate. Le dernier paramètre spécifie la quantité d'espace libre à permettre pour l'expansion automatique des données ou métadonnées si l'espace devient bas, comme mesure temporaire. Ce sont les valeurs recommandées.$ sudo lvcreate --wipesignatures y -n thinpool docker -l 95%VG Logical volume "thinpool" created. $ sudo lvcreate --wipesignatures y -n thinpoolmeta docker -l 1%VG Logical volume "thinpoolmeta" created. -
Convertissez les volumes en un thin pool et un emplacement de stockage pour les métadonnées du thin pool, en utilisant la commande
lvconvert.$ sudo lvconvert -y \ --zero n \ -c 512K \ --thinpool docker/thinpool \ --poolmetadata docker/thinpoolmeta WARNING: Converting logical volume docker/thinpool and docker/thinpoolmeta to thin pool's data and metadata volumes with metadata wiping. THIS WILL DESTROY CONTENT OF LOGICAL VOLUME (filesystem etc.) Converted docker/thinpool to thin pool. -
Configurez l'auto-extension des thin pools via un profil
lvm.$ sudo vi /etc/lvm/profile/docker-thinpool.profile -
Spécifiez les valeurs
thin_pool_autoextend_thresholdetthin_pool_autoextend_percent.thin_pool_autoextend_thresholdest le pourcentage d'espace utilisé avant quelvmtente d'auto-étendre l'espace disponible (100 = désactivé, non recommandé).thin_pool_autoextend_percentest la quantité d'espace à ajouter au périphérique lors de l'extension automatique (0 = désactivé).L'exemple ci-dessous ajoute 20% de capacité supplémentaire quand l'utilisation du disque atteint 80%.
activation { thin_pool_autoextend_threshold=80 thin_pool_autoextend_percent=20 }Sauvegardez le fichier.
-
Appliquez le profil LVM, en utilisant la commande
lvchange.$ sudo lvchange --metadataprofile docker-thinpool docker/thinpool Logical volume docker/thinpool changed. -
Assurez-vous que la surveillance du volume logique est activée.
$ sudo lvs -o+seg_monitor LV VG Attr LSize Pool Origin Data% Meta% Move Log Cpy%Sync Convert Monitor thinpool docker twi-a-t--- 95.00g 0.00 0.01 not monitoredSi la sortie dans la colonne
Monitorrapporte, comme ci-dessus, que le volume estnot monitored, alors la surveillance doit être explicitement activée. Sans cette étape, l'extension automatique du volume logique n'aura pas lieu, peu importe les paramètres dans le profil appliqué.$ sudo lvchange --monitor y docker/thinpoolVérifiez à nouveau que la surveillance est maintenant activée en exécutant la commande
sudo lvs -o+seg_monitorune seconde fois. La colonneMonitordevrait maintenant rapporter que le volume logique estmonitored. -
Si vous avez déjà exécuté Docker sur cet hôte auparavant, ou si
/var/lib/docker/existe, déplacez-le hors du chemin pour que Docker puisse utiliser le nouveau pool LVM pour stocker le contenu des images et conteneurs.$ sudo su - # mkdir /var/lib/docker.bk # mv /var/lib/docker/* /var/lib/docker.bk # exitSi l'une des étapes suivantes échoue et vous devez restaurer, vous pouvez supprimer
/var/lib/dockeret le remplacer par/var/lib/docker.bk. -
Éditez
/etc/docker/daemon.jsonet configurez les options nécessaires pour le pilote de stockagedevicemapper. Si le fichier était précédemment vide, il devrait maintenant contenir le contenu suivant :{ "storage-driver": "devicemapper", "storage-opts": [ "dm.thinpooldev=/dev/mapper/docker-thinpool", "dm.use_deferred_removal=true", "dm.use_deferred_deletion=true" ] } -
Démarrez Docker.
systemd :
$ sudo systemctl start dockerservice :
$ sudo service docker start -
Vérifiez que Docker utilise la nouvelle configuration en utilisant
docker info.$ docker info Containers: 0 Running: 0 Paused: 0 Stopped: 0 Images: 0 Server Version: 17.03.1-ce Storage Driver: devicemapper Pool Name: docker-thinpool Pool Blocksize: 524.3 kB Base Device Size: 10.74 GB Backing Filesystem: xfs Data file: Metadata file: Data Space Used: 19.92 MB Data Space Total: 102 GB Data Space Available: 102 GB Metadata Space Used: 147.5 kB Metadata Space Total: 1.07 GB Metadata Space Available: 1.069 GB Thin Pool Minimum Free Space: 10.2 GB Udev Sync Supported: true Deferred Removal Enabled: true Deferred Deletion Enabled: true Deferred Deleted Device Count: 0 Library Version: 1.02.135-RHEL7 (2016-11-16) <...>Si Docker est configuré correctement, le
Data fileetMetadata filesont vides, et le nom du pool estdocker-thinpool. -
Après avoir vérifié que la configuration est correcte, vous pouvez supprimer le répertoire
/var/lib/docker.bkqui contient la configuration précédente.$ sudo rm -rf /var/lib/docker.bk
Gérer devicemapper
Surveiller le thin pool
Ne vous fiez pas uniquement à l'auto-extension LVM. Le groupe de volumes
s'étend automatiquement, mais le volume peut toujours se remplir. Vous pouvez surveiller
l'espace libre sur le volume en utilisant lvs ou lvs -a. Considérez l'utilisation d'un outil
de surveillance au niveau OS, tel que Nagios.
Pour voir les logs LVM, vous pouvez utiliser journalctl :
$ sudo journalctl -fu dm-event.service
Si vous rencontrez des problèmes répétés avec le thin pool, vous pouvez définir l'option de stockage
dm.min_free_space à une valeur (représentant un pourcentage) dans
/etc/docker/daemon.json. Par exemple, la définir à 10 assure
que les opérations échouent avec un avertissement quand l'espace libre est à ou près de 10%.
Voir les
options du pilote de stockage dans la référence du démon Engine.
Augmenter la capacité sur un périphérique en cours d'exécution
Vous pouvez augmenter la capacité du pool sur un périphérique thin-pool en cours d'exécution. C'est utile si le volume logique des données est plein et le groupe de volumes est à pleine capacité. La procédure spécifique dépend de si vous utilisez un thin pool loop-lvm ou un thin pool direct-lvm.
Redimensionner un thin pool loop-lvm
La façon la plus facile de redimensionner un thin pool loop-lvm est d'
utiliser l'utilitaire device_tool,
mais vous pouvez utiliser les utilitaires du système d'exploitation
à la place.
Utiliser l'utilitaire device_tool
Un script contribué par la communauté appelé device_tool.go est disponible dans le
dépôt Github moby/moby.
Vous pouvez utiliser cet outil pour redimensionner un thin pool loop-lvm,
évitant le long processus ci-dessus. Cet outil n'est pas garanti de fonctionner, mais vous
ne devriez utiliser loop-lvm que sur des systèmes non-production.
Si vous ne voulez pas utiliser device_tool, vous pouvez redimensionner le thin pool manuellement à la place.
-
Pour utiliser l'outil, clonez le dépôt Github, changez vers le
contrib/docker-device-tool, et suivez les instructions dans leREADME.mdpour compiler l'outil. -
Utilisez l'outil. L'exemple suivant redimensionne le thin pool à 200GB.
$ ./device_tool resize 200GB
Utiliser les utilitaires du système d'exploitation
Si vous ne voulez pas utiliser l'utilitaire device-tool,
vous pouvez redimensionner un thin pool loop-lvm manuellement en utilisant la procédure suivante.
En mode loop-lvm, un périphérique loopback est utilisé pour stocker les données, et un autre
pour stocker les métadonnées. Le mode loop-lvm n'est supporté que pour les tests, parce qu'
il a des inconvénients significatifs de performance et stabilité.
Si vous utilisez le mode loop-lvm, la sortie de docker info montre les chemins de fichiers
pour Data loop file et Metadata loop file :
$ docker info |grep 'loop file'
Data loop file: /var/lib/docker/devicemapper/data
Metadata loop file: /var/lib/docker/devicemapper/metadata
Suivez ces étapes pour augmenter la taille du thin pool. Dans cet exemple, le thin pool fait 100 GB, et est augmenté à 200 GB.
-
Listez les tailles des périphériques.
$ sudo ls -lh /var/lib/docker/devicemapper/ total 1175492 -rw------- 1 root root 100G Mar 30 05:22 data -rw------- 1 root root 2.0G Mar 31 11:17 metadata -
Augmentez la taille du fichier
dataà 200 G en utilisant la commandetruncate, qui est utilisée pour augmenter ou diminuer la taille d'un fichier. Notez que diminuer la taille est une opération destructive.$ sudo truncate -s 200G /var/lib/docker/devicemapper/data -
Vérifiez que la taille du fichier a changé.
$ sudo ls -lh /var/lib/docker/devicemapper/ total 1.2G -rw------- 1 root root 200G Apr 14 08:47 data -rw------- 1 root root 2.0G Apr 19 13:27 metadata -
Le fichier loopback a changé sur disque mais pas en mémoire. Listez la taille du périphérique loopback en mémoire, en GB. Rechargez-le, puis listez la taille à nouveau. Après le rechargement, la taille est 200 GB.
$ echo $[ $(sudo blockdev --getsize64 /dev/loop0) / 1024 / 1024 / 1024 ] 100 $ sudo losetup -c /dev/loop0 $ echo $[ $(sudo blockdev --getsize64 /dev/loop0) / 1024 / 1024 / 1024 ] 200 -
Rechargez le thin pool devicemapper.
a. Obtenez d'abord le nom du pool. Le nom du pool est le premier champ, délimité par
:. Cette commande l'extrait.$ sudo dmsetup status | grep ' thin-pool ' | awk -F ': ' {'print $1'} docker-8:1-123141-poolb. Videz la table device mapper pour le thin pool.
$ sudo dmsetup table docker-8:1-123141-pool 0 209715200 thin-pool 7:1 7:0 128 32768 1 skip_block_zeroingc. Calculez le total de secteurs du thin pool en utilisant le second champ de la sortie. Le nombre est exprimé en secteurs de 512-k. Un fichier de 100G a 209715200 secteurs de 512-k. Si vous doublez ce nombre à 200G, vous obtenez 419430400 secteurs de 512-k.
d. Rechargez le thin pool avec le nouveau nombre de secteurs, en utilisant les trois commandes
dmsetupsuivantes.$ sudo dmsetup suspend docker-8:1-123141-pool $ sudo dmsetup reload docker-8:1-123141-pool --table '0 419430400 thin-pool 7:1 7:0 128 32768 1 skip_block_zeroing' $ sudo dmsetup resume docker-8:1-123141-pool
Redimensionner un thin pool direct-lvm
Pour étendre un thin pool direct-lvm, vous devez d'abord attacher un nouveau périphérique bloc
à l'hôte Docker, et noter le nom qui lui est assigné par le noyau. Dans
cet exemple, le nouveau périphérique bloc est /dev/xvdg.
Suivez cette procédure pour étendre un thin pool direct-lvm, en substituant votre
périphérique bloc et autres paramètres pour convenir à votre situation.
-
Rassemblez des informations sur votre groupe de volumes.
Utilisez la commande
pvdisplaypour trouver les périphériques bloc physiques actuellement en usage par votre thin pool, et le nom du groupe de volumes.$ sudo pvdisplay |grep 'VG Name' PV Name /dev/xvdf VG Name dockerDans les étapes suivantes, substituez votre périphérique bloc ou nom de groupe de volumes selon le cas.
-
Étendez le groupe de volumes, en utilisant la commande
vgextendavec leVG Namede l'étape précédente, et le nom de votre nouveau périphérique bloc.$ sudo vgextend docker /dev/xvdg Physical volume "/dev/xvdg" successfully created. Volume group "docker" successfully extended -
Étendez le volume logique
docker/thinpool. Cette commande utilise 100% du volume immédiatement, sans auto-extension. Pour étendre le thinpool de métadonnées à la place, utilisezdocker/thinpool_tmeta.$ sudo lvextend -l+100%FREE -n docker/thinpool Size of logical volume docker/thinpool_tdata changed from 95.00 GiB (24319 extents) to 198.00 GiB (50688 extents). Logical volume docker/thinpool_tdata successfully resized. -
Vérifiez la nouvelle taille du thin pool en utilisant le champ
Data Space Availabledans la sortie dedocker info. Si vous avez étendu le volume logiquedocker/thinpool_tmetaà la place, cherchezMetadata Space Available.Storage Driver: devicemapper Pool Name: docker-thinpool Pool Blocksize: 524.3 kB Base Device Size: 10.74 GB Backing Filesystem: xfs Data file: Metadata file: Data Space Used: 212.3 MB Data Space Total: 212.6 GB Data Space Available: 212.4 GB Metadata Space Used: 286.7 kB Metadata Space Total: 1.07 GB Metadata Space Available: 1.069 GB <...>
Activer le devicemapper après redémarrage
Si vous redémarrez l'hôte et trouvez que le service docker a échoué à démarrer,
cherchez l'erreur, "Non existing device". Vous devez réactiver les
volumes logiques avec cette commande :
$ sudo lvchange -ay docker/thinpool
Comment fonctionne le pilote de stockage devicemapper
WarningNe manipulez pas directement les fichiers ou répertoires dans
/var/lib/docker/. Ces fichiers et répertoires sont gérés par Docker.
Utilisez la commande lsblk pour voir les périphériques et leurs pools, du point de vue
du système d'exploitation :
$ sudo lsblk
NAME MAJ:MIN RM SIZE RO TYPE MOUNTPOINT
xvda 202:0 0 8G 0 disk
└─xvda1 202:1 0 8G 0 part /
xvdf 202:80 0 100G 0 disk
├─docker-thinpool_tmeta 253:0 0 1020M 0 lvm
│ └─docker-thinpool 253:2 0 95G 0 lvm
└─docker-thinpool_tdata 253:1 0 95G 0 lvm
└─docker-thinpool 253:2 0 95G 0 lvm
Utilisez la commande mount pour voir le point de montage que Docker utilise :
$ mount |grep devicemapper
/dev/xvda1 on /var/lib/docker/devicemapper type xfs (rw,relatime,seclabel,attr2,inode64,noquota)
Quand vous utilisez devicemapper, Docker stocke le contenu des images et couches dans le
thinpool, et les expose aux conteneurs en les montant sous
des sous-répertoires de /var/lib/docker/devicemapper/.
Couches d'images et de conteneurs sur disque
Le répertoire /var/lib/docker/devicemapper/metadata/ contient des métadonnées sur
la configuration Devicemapper elle-même et sur chaque couche d'image et de conteneur
qui existe. Le pilote de stockage devicemapper utilise des snapshots, et ces métadonnées
incluent des informations sur ces snapshots. Ces fichiers sont au format JSON.
Le répertoire /var/lib/docker/devicemapper/mnt/ contient un point de montage pour chaque couche d'image
et de conteneur qui existe. Les points de montage des couches d'images sont vides, mais le
point de montage d'un conteneur montre le système de fichiers du conteneur tel qu'il apparaît
depuis l'intérieur du conteneur.
Superposition et partage d'images
Le pilote de stockage devicemapper utilise des périphériques bloc dédiés plutôt que
des systèmes de fichiers formatés, et opère sur les fichiers au niveau bloc pour une performance
maximum pendant les opérations de copie-sur-écriture (CoW).
Snapshots
Une autre fonctionnalité de devicemapper est son utilisation de snapshots (aussi parfois appelés
périphériques fins ou périphériques virtuels), qui stockent les différences introduites dans
chaque couche comme des thin pools très petits et légers. Les snapshots fournissent de nombreux
avantages :
-
Les couches qui sont partagées en commun entre conteneurs ne sont stockées sur disque qu' une seule fois, à moins qu'elles ne soient inscriptibles. Par exemple, si vous avez 10 images différentes qui sont toutes basées sur
alpine, l'imagealpineet toutes ses images parentes ne sont stockées qu'une fois chacune sur disque. -
Les snapshots sont une implémentation d'une stratégie de copie-sur-écriture (CoW). Cela signifie qu'un fichier ou répertoire donné n'est copié vers la couche inscriptible du conteneur que quand il est modifié ou supprimé par ce conteneur.
-
Parce que
devicemapperopère au niveau bloc, plusieurs blocs dans une couche inscriptible peuvent être modifiés simultanément. -
Les snapshots peuvent être sauvegardés en utilisant des utilitaires de sauvegarde standard au niveau OS. Faites simplement une copie de
/var/lib/docker/devicemapper/.
Flux de travail Devicemapper
Quand vous démarrez Docker avec le pilote de stockage devicemapper, tous les objets
liés aux couches d'images et de conteneurs sont stockés dans
/var/lib/docker/devicemapper/, qui est supporté par un ou plusieurs périphériques de niveau bloc,
soit des périphériques loopback (tests seulement) soit des disques physiques.
-
Le périphérique de base est l'objet de plus bas niveau. C'est le thin pool lui-même. Vous pouvez l'examiner en utilisant
docker info. Il contient un système de fichiers. Ce périphérique de base est le point de départ pour chaque couche d'image et de conteneur. Le périphérique de base est un détail d'implémentation Device Mapper, plutôt qu'une couche Docker. -
Les métadonnées sur le périphérique de base et chaque couche d'image ou de conteneur sont stockées dans
/var/lib/docker/devicemapper/metadata/au format JSON. Ces couches sont des snapshots de copie-sur-écriture, ce qui signifie qu'elles sont vides jusqu'à ce qu'elles divergent de leurs couches parentes. -
La couche inscriptible de chaque conteneur est montée sur un point de montage dans
/var/lib/docker/devicemapper/mnt/. Un répertoire vide existe pour chaque couche d'image en lecture seule et chaque conteneur arrêté.
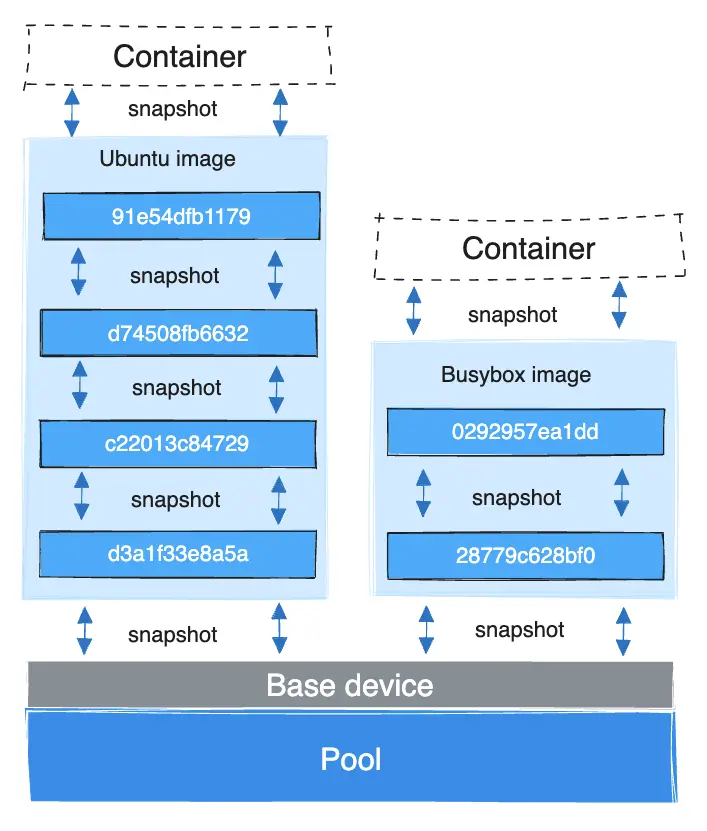
Chaque couche d'image est un snapshot de la couche en dessous. La couche la plus basse de chaque
image est un snapshot du périphérique de base qui existe dans le pool. Quand vous exécutez un
conteneur, c'est un snapshot de l'image sur laquelle le conteneur est basé. L'exemple
suivant montre un hôte Docker avec deux conteneurs en cours d'exécution. Le premier est un conteneur ubuntu
et le second est un conteneur busybox.
Comment les lectures et écritures de conteneur fonctionnent avec devicemapper
Lecture de fichiers
Avec devicemapper, les lectures se passent au niveau bloc. Le diagramme ci-dessous montre
le processus de haut niveau pour lire un seul bloc (0x44f) dans un exemple
de conteneur.
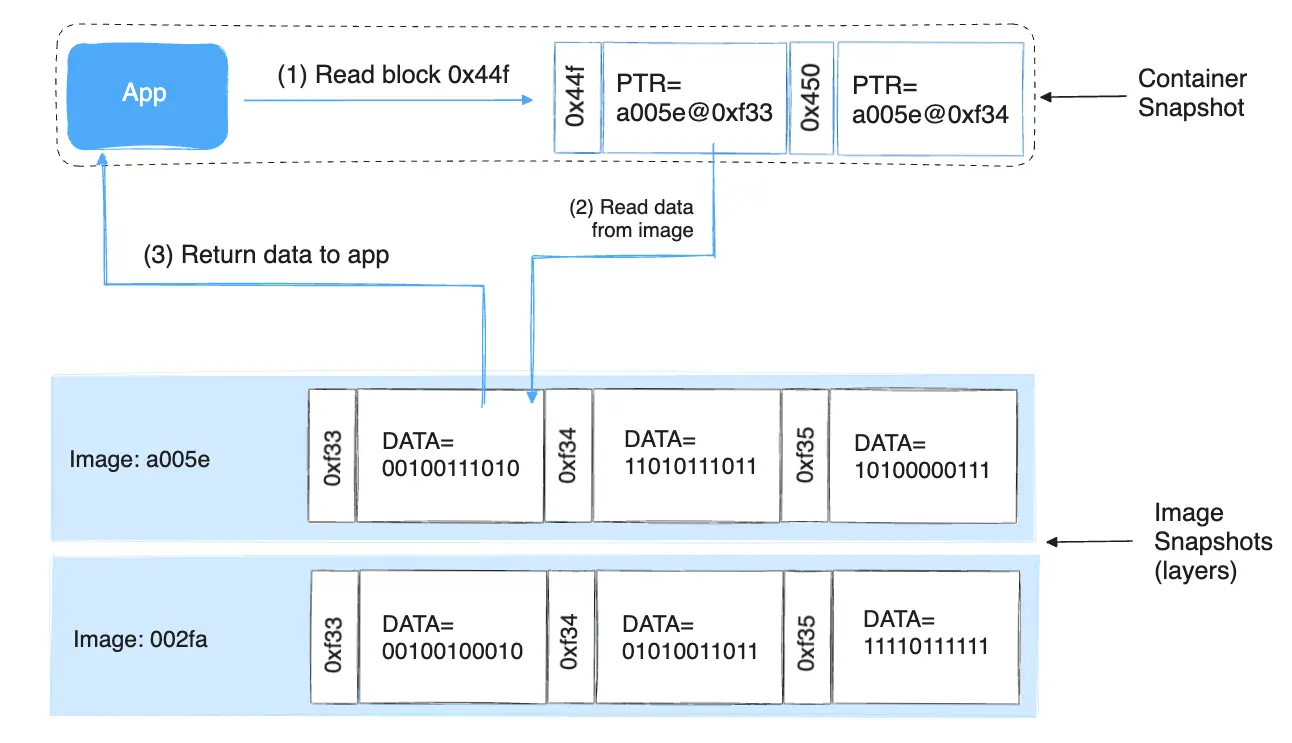
Une application fait une demande de lecture pour le bloc 0x44f dans le conteneur. Parce que
le conteneur est un snapshot fin d'une image, il n'a pas le bloc, mais il
a un pointeur vers le bloc sur l'image parente la plus proche où il existe, et
il lit le bloc depuis là. Le bloc existe maintenant dans la mémoire du conteneur.
Écriture de fichiers
Écriture d'un nouveau fichier : Avec le pilote devicemapper, écrire de nouvelles données dans un
conteneur s'accomplit par une opération allocate-on-demand. Chaque bloc du
nouveau fichier est alloué dans la couche inscriptible du conteneur et le bloc y est
écrit.
Mise à jour d'un fichier existant : Le bloc pertinent du fichier est lu depuis la couche la plus proche où il existe. Quand le conteneur écrit le fichier, seuls les blocs modifiés sont écrits dans la couche inscriptible du conteneur.
Suppression d'un fichier ou répertoire : Quand vous supprimez un fichier ou répertoire dans la
couche inscriptible d'un conteneur, ou quand une couche d'image supprime un fichier qui existe
dans sa couche parente, le pilote de stockage devicemapper intercepte les futures tentatives
de lecture sur ce fichier ou répertoire et répond que le fichier ou répertoire n'existe
pas.
Écriture puis suppression d'un fichier : Si un conteneur écrit dans un fichier et plus tard
supprime le fichier, toutes ces opérations se passent dans la couche inscriptible du conteneur.
Dans ce cas, si vous utilisez direct-lvm, les blocs sont libérés. Si vous
utilisez loop-lvm, les blocs peuvent ne pas être libérés. C'est une autre raison de ne pas utiliser
loop-lvm en production.
Device Mapper et performance Docker
-
Impact de performance
allocate-on demand:Le pilote de stockage
devicemapperutilise une opérationallocate-on-demandpour allouer de nouveaux blocs depuis le thin pool dans la couche inscriptible d'un conteneur. Chaque bloc fait 64KB, donc c'est la quantité minimale d'espace qui est utilisée pour une écriture. -
Impact de performance de copie-sur-écriture : La première fois qu'un conteneur modifie un bloc spécifique, ce bloc est écrit dans la couche inscriptible du conteneur. Parce que ces écritures se passent au niveau du bloc plutôt qu'au niveau du fichier, l'impact sur la performance est minimisé. Cependant, écrire un grand nombre de blocs peut encore impacter négativement la performance, et le pilote de stockage
devicemapperpeut en fait performer moins bien que d'autres pilotes de stockage dans ce scénario. Pour les charges de travail intensives en écriture, vous devriez utiliser des volumes de données, qui contournent complètement le pilote de stockage.
Meilleures pratiques de performance
Gardez ces choses à l'esprit pour maximiser la performance lors de l'utilisation du pilote de stockage
devicemapper.
-
Utilisez
direct-lvm: Le modeloop-lvmn'est pas performant et ne devrait jamais être utilisé en production. -
Utilisez du stockage rapide : Les disques à état solide (SSD) fournissent des lectures et écritures plus rapides que les disques rotatifs.
-
Utilisation mémoire : le
devicemapperutilise plus de mémoire que certains autres pilotes de stockage. Chaque conteneur lancé charge une ou plusieurs copies de ses fichiers en mémoire, selon combien de blocs du même fichier sont modifiés en même temps. Dû à la pression mémoire, le pilote de stockagedevicemapperpeut ne pas être le bon choix pour certaines charges de travail dans les cas d'usage à haute densité. -
Utilisez des volumes pour les charges de travail intensives en écriture : Les volumes fournissent les meilleures et plus prévisibles performances pour les charges de travail intensives en écriture. C'est parce qu'ils contournent le pilote de stockage et n'encourent aucun des coûts supplémentaires potentiels introduits par le provisioning fin et la copie-sur-écriture. Les volumes ont d'autres avantages, tels que vous permettre de partager des données entre conteneurs et persister même quand aucun conteneur en cours d'exécution ne les utilise.
NoteLors de l'utilisation de
devicemapperet du pilote de logjson-file, les fichiers de log générés par un conteneur sont encore stockés dans le répertoire dataroot de Docker, par défaut/var/lib/docker. Si vos conteneurs génèrent beaucoup de messages de log, ceci peut mener à une utilisation accrue du disque ou à l'incapacité de gérer votre système dû à un disque plein. Vous pouvez configurer un pilote de log pour stocker vos logs de conteneur externalement.